
05 Quad-RGB-Sensor
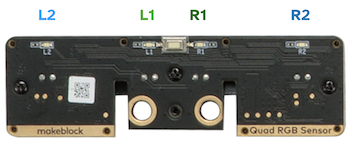
Der Quad-RGB-Sensor befindet sich vorne am Roboter. Er leuchtet mit farbigem Licht (rot, grün und blau: RGB) nach unten und misst mit vier Fotosensoren die reflektierte Helligkeit. Dadurch kann er die Farbe oder die Helligkeit an diesen vier Stellen erkennen, und damit eine Markierung (Linie) vom normalen Untergrund (Hintergrund) unterscheiden.Zwei Fotosensoren liegen in der Mitte (L1 und R1), zwei am Rand (L2 und R2) des Roboters.

Kalibrierung (Anlernen)
Damit der Quad-RGB-Sensor zuverlässig funktioniert, muss er kalibriert (angelernt) werden:- Stelle den mBot auf den Tisch (normaler Untergrund)
- Drücke den kleinen weißen Taster in der Mitte des Sensors schnell zweimal hintereinander. Die blauen LEDs am Sensor beginnen schnell zu blinken.
- Schiebe den mBot vorsichtig über die Linie.
- Nach ein paar Sekunden hören die blauen LEDs zu blinken auf. Fertig!
Linienfolger

 ★ ★ ☆
★ ★ ☆
Schreibe ein Programm, das deinen Roboter einer Linie
auf dem Tisch folgen lässt.
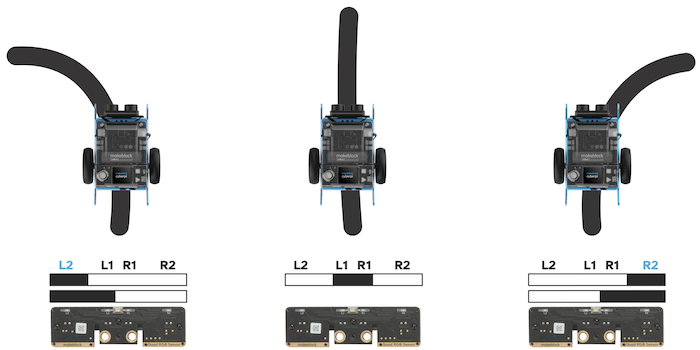
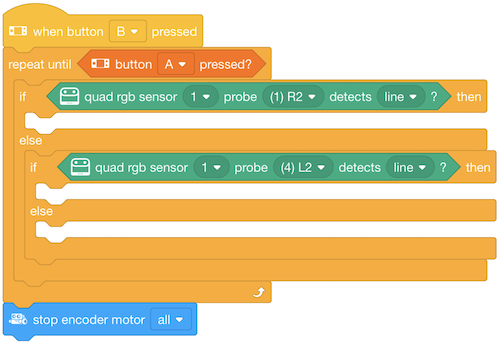
Fülle die Programmstruktur oben mit den passenden Bewegungsblöcken:

Tipp: Im Upload-Modus fährt der mBot ruhiger, weil er dann schneller auf Kursabweichungen reagiert. Du musst aber dann bei jeder Änderung das Programm neu in den Roboter laden.