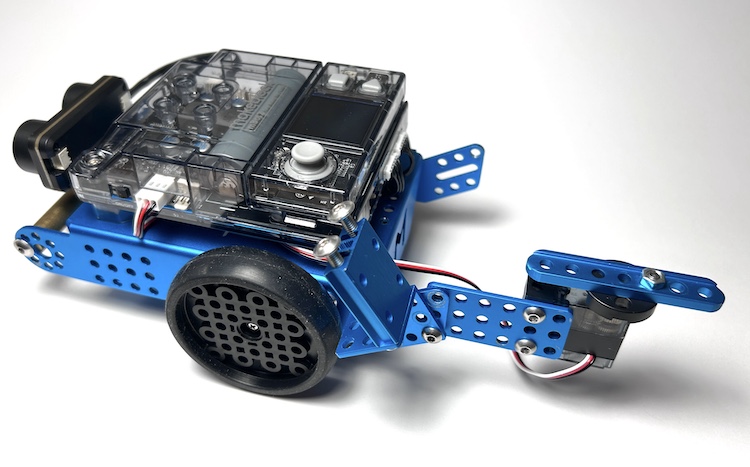
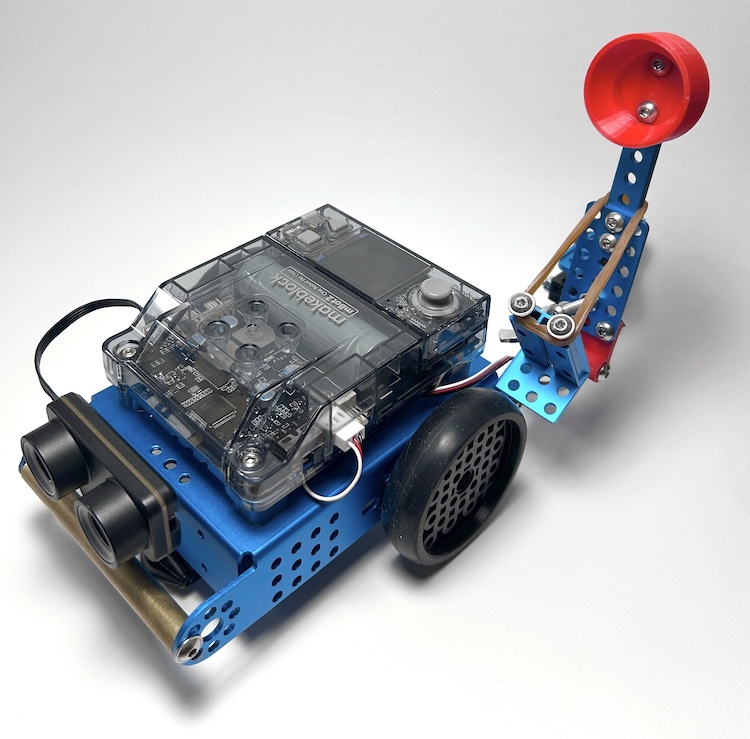
Baue den Ultraschallsensor und die Gewichtstange vorne an den Roboter.
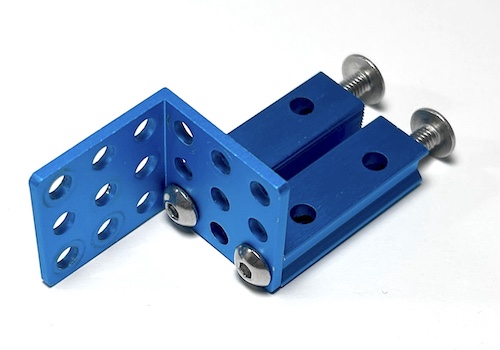
Schraube Winkel und Profil zusammen. Die beiden Schrauben auf der anderen Seite schraubst du nur zur Hälfte in das Profil.
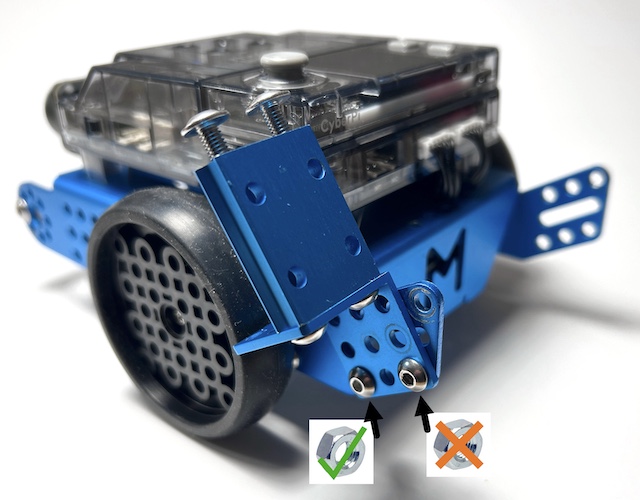
Befestige den Winkel hinten am mBot. Verwende dafür zwei Schrauben, lasse die hintere Mutter aber noch weg.
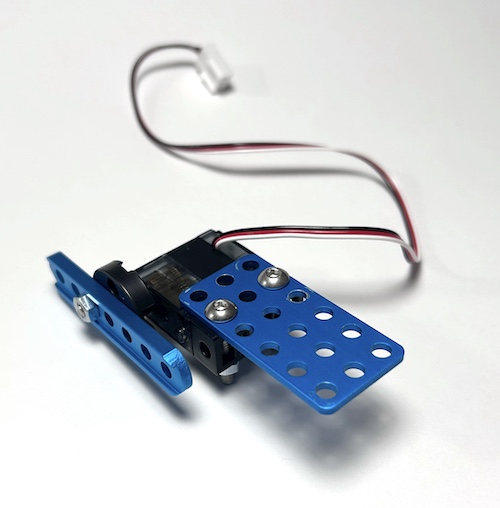
Schraube einen Lochstab an die runde Servomotorplatte und befestige eine kleine Platte unten am Servomotor.
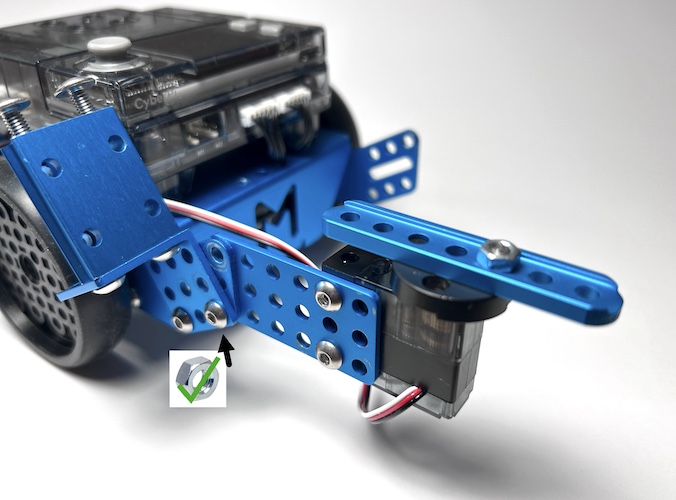
Montiere den Servomotor an der hinteren Schraube.
Stecke das Kabel des Servomotors in die S1-Buchse am mBot-Shield.
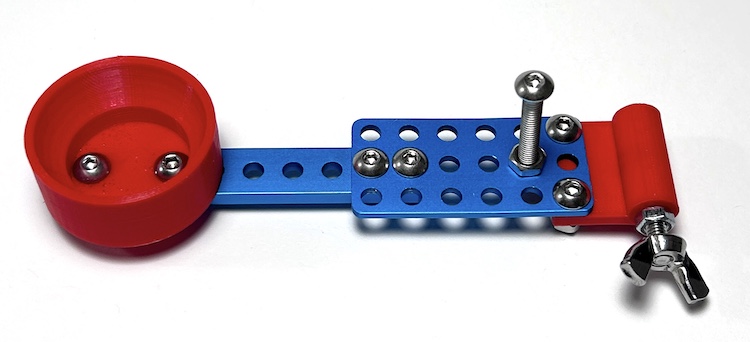
Baue den Katapultarm mit den zwei 3D-Druck-Teilen, einem Lochstab und einer kleinen Platte auf. Verwende jeweils zwei Muttern für beide langen Schrauben. Die Schraube rechts durch das 3D-Druck-Teil soll sich leicht drehen lassen.
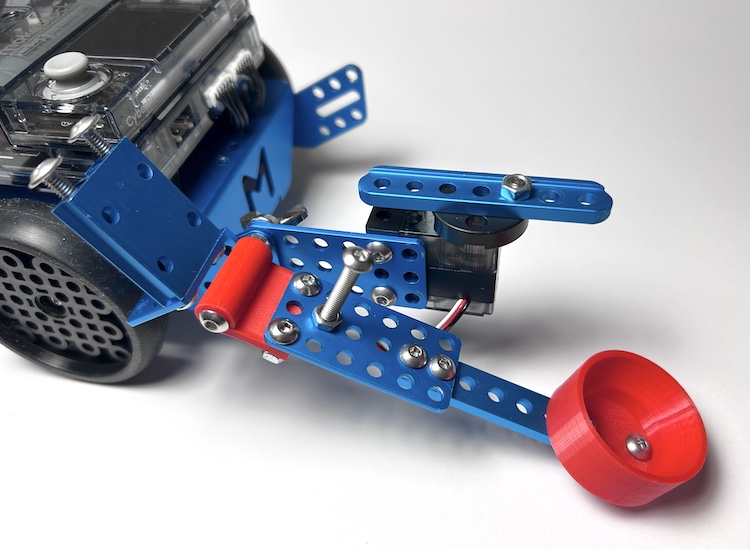
Montiere den Arm hinten am mBot.
Spanne ein Gummiband zwischen Arm und Winkel. Fertig!
Laden
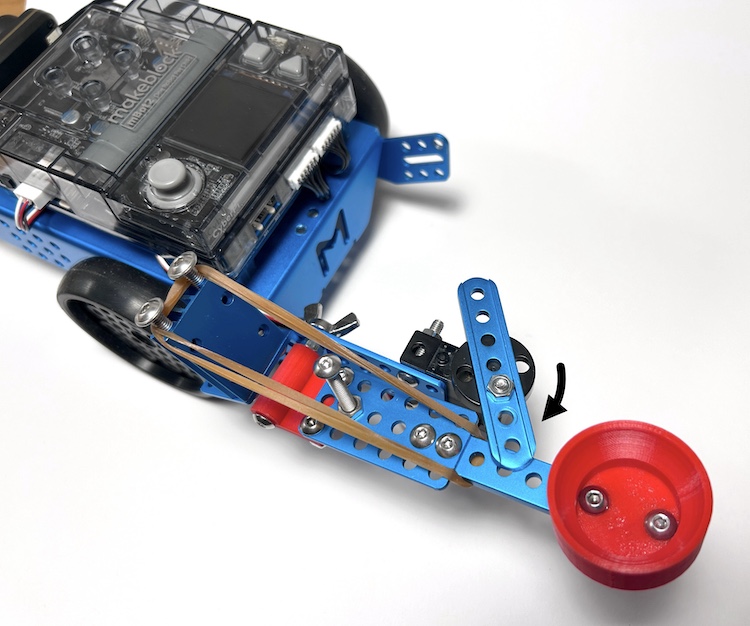
Um das Katapult zu laden, drücke den Arm nach unten und drehe den Servomotor so, dass der Katapultarm gehalten wird. Lege dann einen Ball in den Halter.
Programm
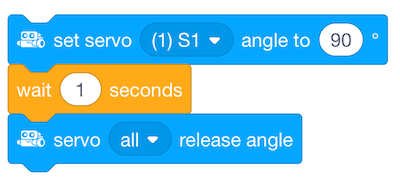
Verwende die folgenden Blöcke, um den Servomotor zu drehen, und damit den Katapultarm freizugeben. Es kann sein, dass du den Winkel im ersten Block für deinen Roboter anpassen musst.





 ★ ★ ☆
★ ★ ☆