
f1 Solarfinder
 ★ ★ ☆
★ ★ ☆
Dein Roboter befindet sich auf der Oberfläche des Planeten Mars. Der Akku hat nur noch 19% Restkapazität. Es ist Zeit, an einen möglichst hellen Ort zu fahren und die Solarzellen auszuklappen.
Schreibe ein Programm, um den optimalen Ladeplatz zu finden. Nutze dafür den Helligkeitssensor des CyberPi-Prozessors.
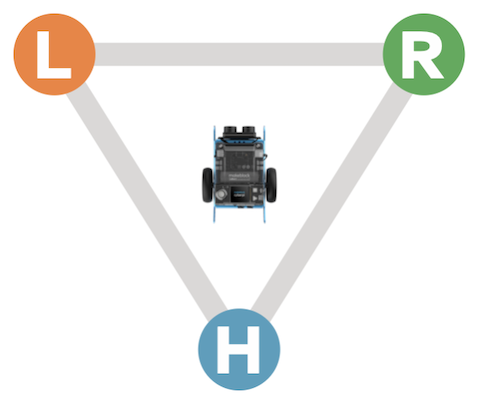
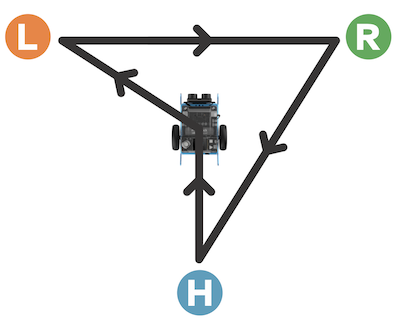
Vom Startpunkt soll der Roboter jeweils 20 cm in drei verschiedene Richtungen fahren: L (60° nach vorne links), R (60° nach vorne rechts) und H (nach hinten).
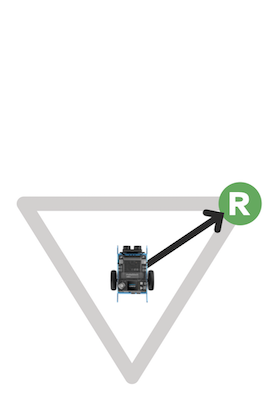
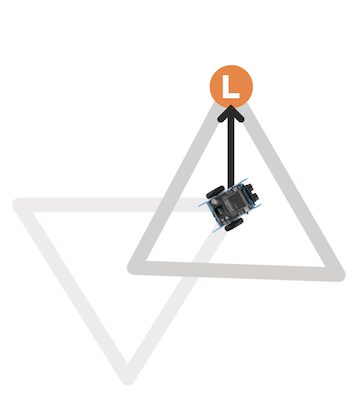
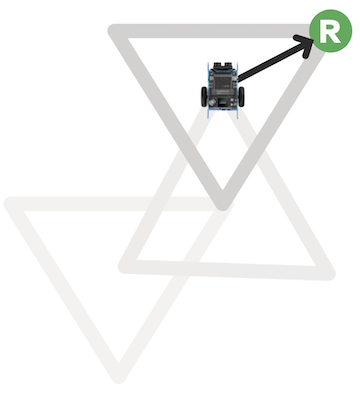
Das Bild unten zeigt ein Beispiel, bei dem der Roboter im ersten Schritt an Position R fährt, im zweiten Schritt an L und im dritten Schritt wieder an R.
Die Programmstruktur besteht aus einer Schleife, die erst die Helligkeit an den drei Punkten misst und dann an den hellsten Punkt fährt. Anschließend wird die Helligkeit als Liniendiagramm auf dem Display angezeigt.
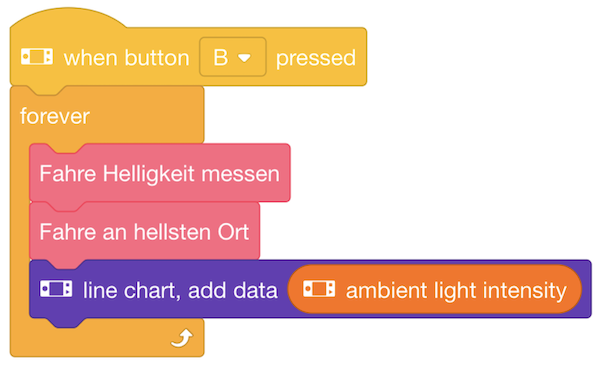
Fahre Helligkeit messen
Dieser Block fährt alle drei Punkte an, erst L, dann R , dann H und kehrt am Ende an den Ausgangspunkt zurück. Es werden drei Variablen benötigt, die die Helligkeit an den Punkten speichern.
Fahre an hellsten Ort
Dieser Block soll prüfen, welcher Punkt die größte Helligkeit hat. Größte Helligkeit bedeutet, dass die Helligkeit dort größer als in beiden anderen Punkten ist. Im Beispiel unten wird geprüft, ob der Punkt R die größte Helligkeit hat.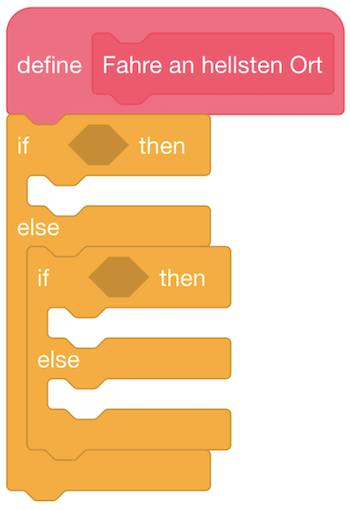

Python API
In Python kann der Umgebungslichtsensor mit dem Befehllight = cyberpi.get_brightness()
abgefragt werden. Der Rückgabewert liegt zwischen 0 (sehr dunkel) und 100 (sehr hell).