
f2.2 Höhlenlabyrinth kartografieren



 ★ ★ ☆
★ ★ ☆
Der Roboter soll das Höhlenlabyrinth vermessen und Länge und Winkel der gefahrenen Strecke auf dem Display anzeigen.
Das Hauptprogramm bleibt gleich:
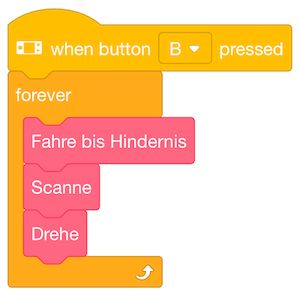
- Fahre bis Hindernis: Fahre nach vorne, bis der Ultraschallsensor ein Hindernis erkennt und messe dabei die zurückgelegte Strecke
- Scanne die Umgebung mit dem Ultraschallsensor und bestimme, in welchem Winkel der größte Abstand gemessen wird
- Drehe den mBot in diese Richtung
Fahre bis Hindernis
Erweitere den Block um eine Längenmessung. Jeder Motor des mBots besitzt einen Sensor, der den aktuellen Drehwinkel des Rads anzeigt.

Das funktioniert sogar, wenn Du den mBot mit der Hand bewegst. Probiere es aus und schaue Dir den Wert des Blocks an.
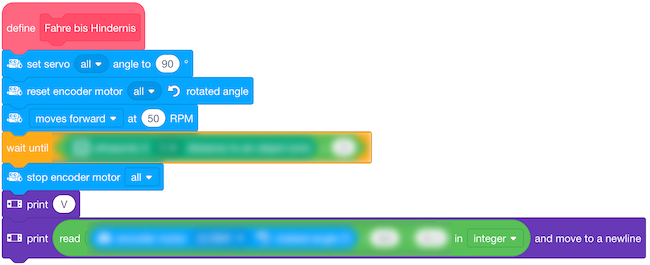
Finde den richtigen Block für die Anzeige der gefahrenen Länge in cm. Eine volle Umdrehung entspricht 360°. Dabei fährt der mBot 20,3 cm weit.
Drehe
Erweitere den Block um eine Anzeige des Drehwinkels.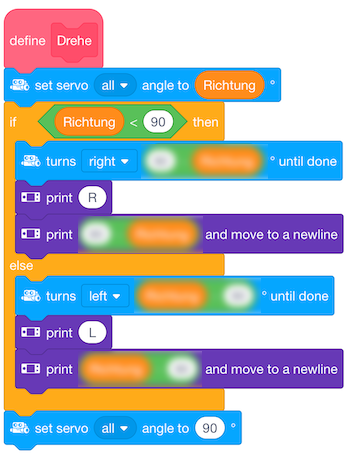
Zusatzaufgabe: Ändere Dein Programm, dass es stoppt, wenn der Roboter am Ende des Labyrinths angekommen ist. Prüfe dazu im Hauptprogramm, ob die maximale Entfernung (Max Entfernung) kleiner als 30 cm ist.
Falls Du noch Lust auf eine weitere Aufgabe hast, geht es hier weiter.