
f3 Stiftplotter
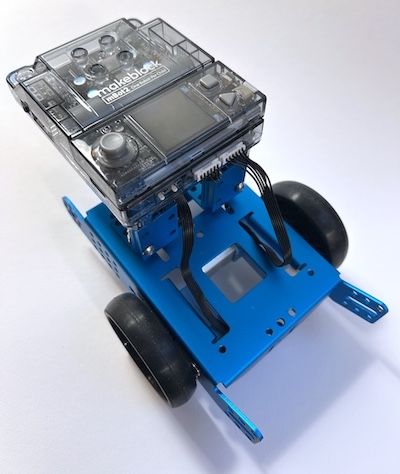
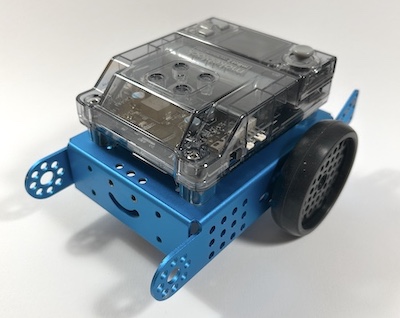
Heute lassen wir den mBot mit einem Filzstift auf Papier schreiben. Dafür bauen wir unseren Roboter zu einem Stiftplotter um. Beim Drehen des Roboters soll der Stift an der gleichen Stelle bleiben. Deshalb muss er genau im Drehpunkt zwischen den Rädern montiert werden.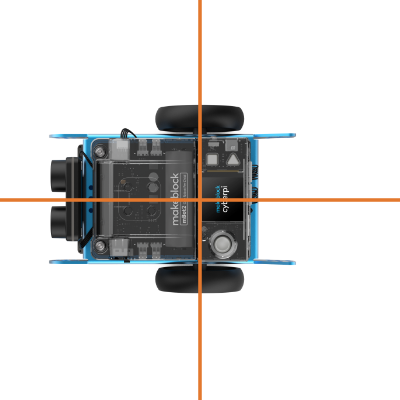
Diese Position liegt genau unter dem Kunststoffgehäuse mit dem CyberPi-Controller. Für unseren Plotter müssen wir das Gehäuse ein Stück nach vorne rücken.
Umbauanleitung
- Baue alle Sensoren (Ultraschallsensor vorne und RGB-Sensor unten) und alle anderen Teile vom mBot ab.
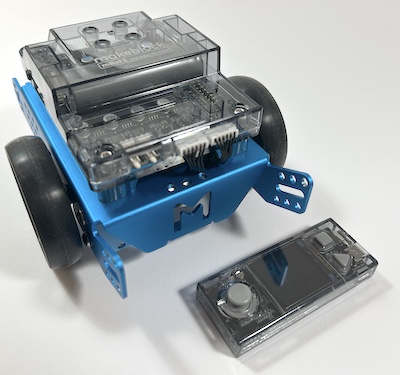
- Ziehe den CyberPi-Controller gerade nach oben ab. Das geht ziemlich schwer. Achte darauf, dass Du die Kontakte des Steckers nicht verbiegst.

- Ziehe beide Motorkabel von der Rückseite des Gehäuses ab.
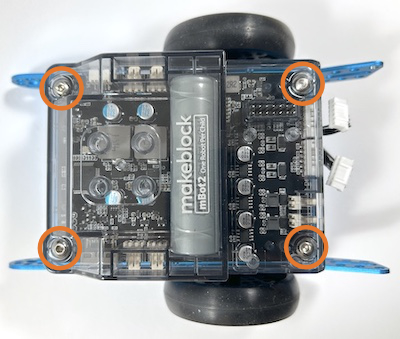
- Entferne die vier Schrauben an den Ecken des Gehäuses. Du kannst das Gehäuse jetzt vom Fahrwerk abheben.
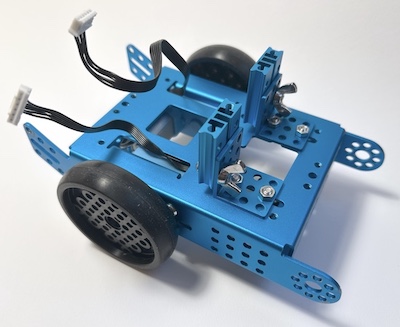
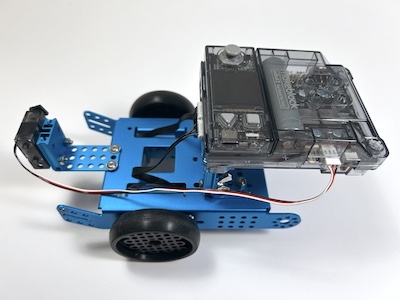
- Schraube zwei Winkel und zwei Adapterplatten an das Fahrwerk.
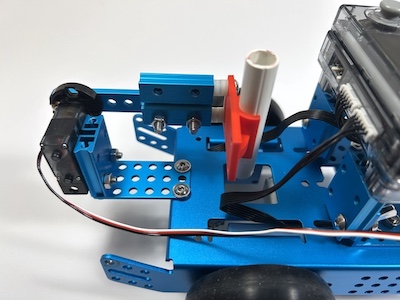
- Schraube das Gehäuse mit den hinteren Ecken an die Winkel. In der rechteckigen Öffnung zwischen den Rädern darf kein Kabel liegen. Hier kommt der Stift hin. Setze den CyberPi-Controller vorsichtig wieder auf das Gehäuse und drücke ihn fest. Achte darauf, dass Du dabei die Kontakte nicht verbiegst.
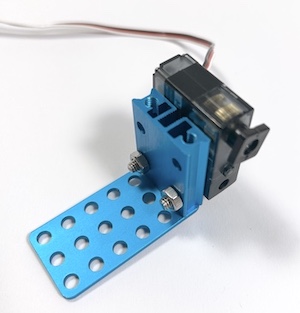

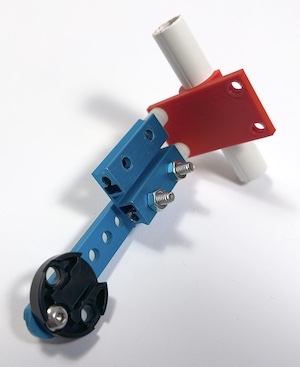
- Schraube nun Winkel, Adapterplatte und Servomotor zusammen.
- Befestige den Servomotor hinten am mBot und schließe das Kabel an Buchse S1 an.

- Baue jetzt den Arm für den Stifthalter auf. Die Kunststoffscheiben sorgen für den richtigen Abstand.
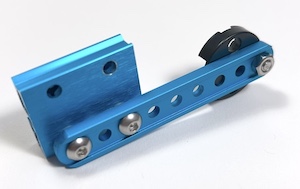
- Befestige eine Adapterplatte am Arm.
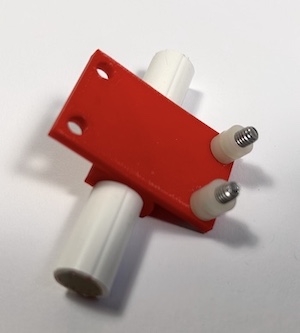
- Auf jede Schraube kommen zwei Kunststoffscheiben.
- Schraube den Stifthalter vorne an den Arm.
- Befestige den Arm am Servomotor.

- Befestige einen Kabelbinder am Stift. Den überstehenden Rest kannst Du abschneiden.
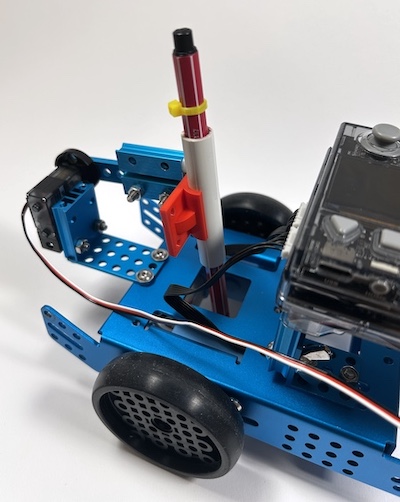
- Stecke den Stift in den Stifthalter. Lasse zunächst die Kappe auf dem Stift.
Fertig! Der Stift soll die Tischoberfläche berühren, wenn Du den Arm nach unten bewegst und keinen Kontakt zur Oberfläche haben, wenn du den Arm ein Stück nach oben bewegst. Dabei darf kein Kabel im Weg sein. Verschiebe den Kabelbinder am Stift, falls nötig.
TMS



 ★ ★ ☆
★ ★ ☆
Verwende dazu zwei eigene Blöcke Stift hoch und Stift runter, um den Arm zu bewegen.
Bevor Du weiterprogrammierst, prüfe, dass die beiden Blöcke den Stift richtig bewegen.
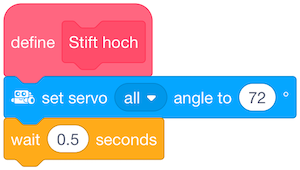
Stift hoch soll den Stift ein kleines Stück vom Papier anheben, aber nicht so viel, dass er an den Motor stößt.
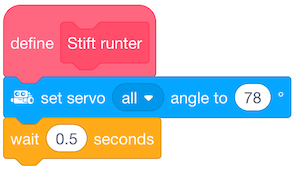
Stift runter soll den Stift auf das Papier aufsetzen. Der Kabelbinder soll sich dann ein kleines Stück über der weißen Hülse befinden.
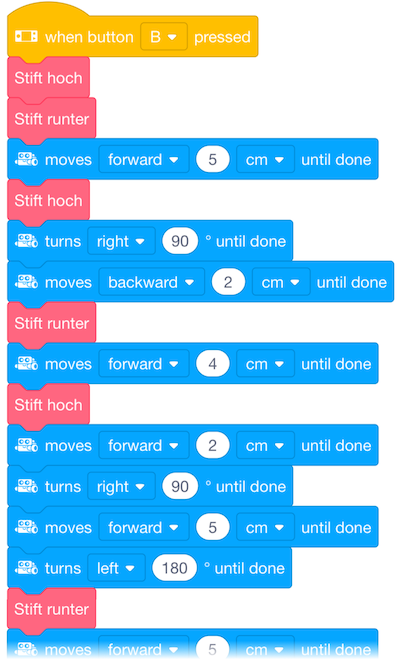
Hier ist der Anfang des Programms (Buchstabe T). Programmiere den Rest!
Muster mit Schleifen
★ ☆ ☆
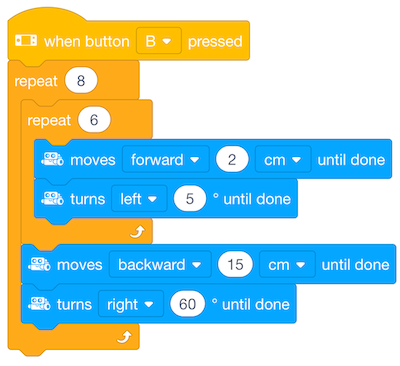
Benutze den Repeat Block, um Muster auf das Papier zu plotten.
Alles, was innerhalb der Klammer steht, wird so oft wiederholt, wie Du es angibst.
Das Haus vom Nikolaus
★ ★ ☆
Schreibe ein Programm, das das Haus vom Nikolaus in einem Zug – ohne den Stift zu heben – auf Papier plottet.

Python API
In Python wird der Servomotor an S1 mit dem Befehlmbot2.servo_set(angle, "s1")
auf den Winkel angle Grad (°) gesetzt. Der Wertebereich liegt zwischen 0° und 180°.