04.β Servomotor

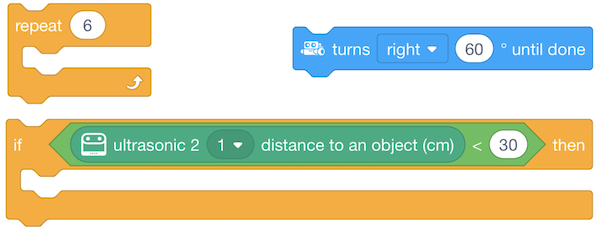
Zum Beispiel:
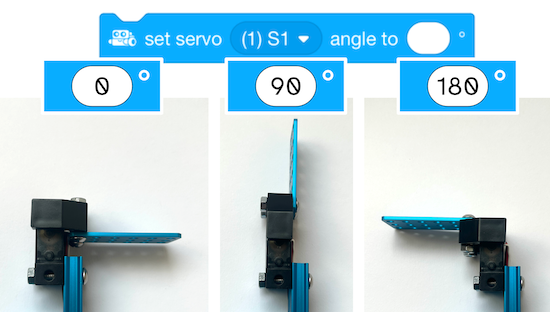
Der mBot kann bis zu vier Servomotoren ansteuern (Buchsen S1 bis S4). Den passenden Befehlsblock findest Du im zweiten hellblauen Menü.
Erste Aufgabe:
- Baue mit einem Servomotor einen Greifer an deinen mBot.
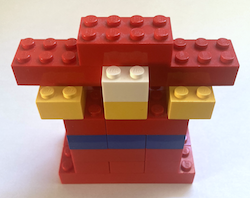
- Schreibe ein Programm, mit dem Du eine Lego-Figur einsammeln kannst, die 30 cm vor Deinem Roboter steht.
Mondstation β (Beta)



 ★ ★ ☆
★ ★ ☆
Deine Mission:
- Finde die Station
- Bring sie zur Zentrale in der Mitte zurück
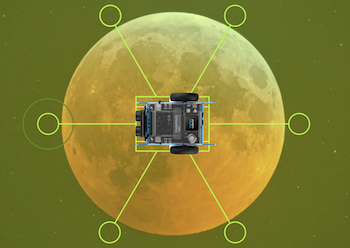
Schreibe ein Programm, um die Relaystation zu bergen. Drehe den Roboter von einer möglichen Position zur nächsten und prüfe mit dem Ultraschallsensor, ob sich die Station an dieser Position befindet. Falls der Sensor die Station erkennt, fahre zu ihr, lade sie mit dem Greifer ein und bringe sie zurück zur Zentrale.
Du brauchst Du

 die Shield- und die Ultraschall-Erweiterung.
die Shield- und die Ultraschall-Erweiterung.
Für diese Aufgabe musst Du dir überlegen, welche Programmblöcke in welcher Reihenfolge benötigt werden. Es gibt eine Alternativaufgabe ohne Ultraschallsensor, bei der du weniger knobeln aber dafür mehr Entfernungen und Drehwinkel ausprobieren musst.
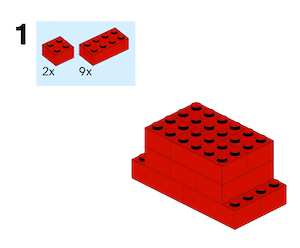
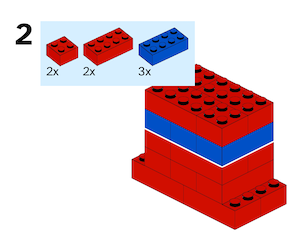
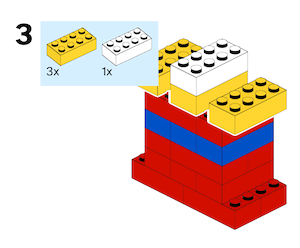
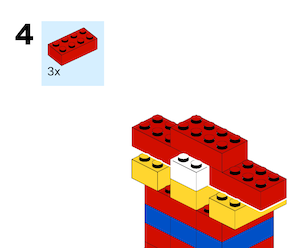
Bauanleitung für die Relaystation
- Überprüfe, ob der Ultraschallsensor richtig funktioniert. Manchmal stört der Greifer den Sensor.
- Es gibt sechs mögliche Positionen für die Station und ein ganzer Kreis hat 360°.
- Wenn die Sensorabfrage einen Abstand kleiner als 30 cm ergibt, steht die Relaystation vor dem Roboter.
- Die folgenden Befehlsblöcke helfen Dir, verwende sie in Deinem Programm: